/*
Here are the commands Arduino recognizes.
1. Any character stream must be sent enclosed inside parenthesis.
Example: Suppose if you want to display a message "Hello! How are you doing?"
You should send it like this: (Hello! How are you doing?)
When the Arduino receives the first character as '(', it understands that the upcoming characters are display data until ')'
is received. The message is displayed as scrolling from right to left.
2. Display intensity can be incremented or decremented by sending /+ or /- respectively. Every time the Arduino receives '/',
it understands it is a command. It supports 16 brightness levels.
3. Similarly, scrolling speed can be increased or decreased by sending /< or /> respectively.
4. /p is used to pause the scrolling message. Sending this command again resumes the scroll.
5. /e is used to erase the buffer and blank the display
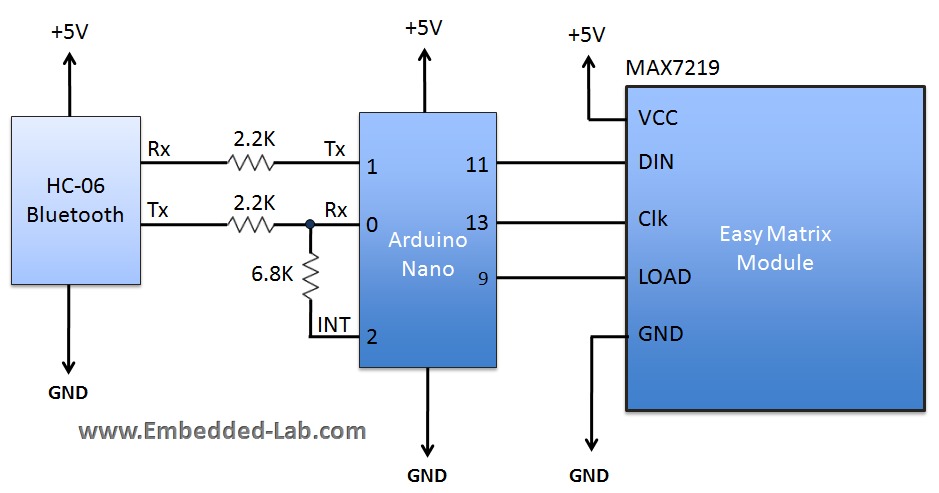
Connections:
Easy Matrix Arduino
VCC +5V
DIN MOSI (Pin 11)
LOAD pinCS defined in the program below
CLK SCK (Pin 13)
GND Gnd
The UART communication happens at 9600 baud.
Written by: Rajendra Bhatt
Contact: [email protected]
Easy Matrix product link: http://embedded-lab.com/blog/?p=9186
*/
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Max72xxPanel.h>
int pinCS = 10; // Attach CS to this pin, DIN to MOSI and CLK to SCK (cf http://arduino.cc/en/Reference/SPI )
int numberOfHorizontalDisplays = 7;
int numberOfVerticalDisplays = 1;
Max72xxPanel matrix = Max72xxPanel(pinCS, numberOfHorizontalDisplays, numberOfVerticalDisplays);
int scrollspeed = 100; // Default scrollspeed (milliseconds)
int spacer = 1; // Space between two characters
int width = 5 + spacer; // The font width is 5 pixels
boolean inChar = false, NewData = false, pause = false;
boolean dataAvailable = false;
char inputString[512];
int count = 0, BTvalue = 5;
void setup() {
matrix.setIntensity(1); // Use a value between 0 and 15 for brightness
// Adjust to your own needs
matrix.setPosition(0, 0, 0); // The first display is at <0, 7>
matrix.setPosition(1, 1, 0); // The second display is at <1, 0>
matrix.setPosition(2, 2, 0); // The third display is at <2, 0>
matrix.setPosition(3, 3, 0); // And the last display is at <3, 0>
matrix.setPosition(4, 4, 0); // The first display is at <0, 0>
matrix.setPosition(5, 5, 0); // The second display is at <1, 0>
matrix.setPosition(6, 6, 0); // The third display is at <2, 0>
// ...
// matrix.setRotation(0, 2); // The first display is position upside down
// matrix.setRotation(3, 2); // The same hold for the last display
matrix.fillScreen(0);
matrix.write();
Serial.begin(9600); // serial communication initialize
// Using interrupt 0 on digital pin 2.
pinMode(2, INPUT);
digitalWrite(2, LOW);
attachInterrupt(0, serialInterrupt, CHANGE);
}
void loop(){
if(dataAvailable){
display_data();
}
}
void display_data(){
for ( int i = 0 ; i < width * count + matrix.width() - 1 - spacer; i++ ) {
matrix.fillScreen(0);
int letter = i / width;
int x = (matrix.width() - 1) - i % width;
int y = (matrix.height() - 8) / 2; // center the text vertically
while ( x + width - spacer >= 0 && letter >= 0 ) {
if ( letter < count ) {
matrix.drawChar(x, y, inputString[letter], HIGH, LOW, 1);
}
letter--;
x -= width;
}
matrix.write(); // Send bitmap to display
if(!dataAvailable){
i = width * count + matrix.width() - 1 - spacer;
matrix.fillScreen(LOW);
matrix.write();
}
if(NewData){
i = 0;
matrix.fillScreen(LOW);
matrix.write();
NewData = false;
}
while(pause == true){
delay(0);
} // Pause here if pause command is received
delay(scrollspeed);
}
}
// Volatile, since it is modified in an ISR.
volatile boolean inService = false;
void serialInterrupt(){
if (inService) return;
// You was not in service. Now you are.
inService = true;
// Reenable interrupts, to allow Serial to work. We do this only if inService is false.
interrupts();
while(!Serial.available());
while (Serial.available()) {
char ch = Serial.read();
if(ch =='('){
count = 0;
inChar = true;
while(inChar){
if (Serial.available()) {
ch = Serial.read();
if(ch == ')'){
inChar = false;
dataAvailable = true;
} else{
inputString[count] = ch;
count++;
}
if(count > 0) {
NewData = true;
}
}
}
}
if(ch =='/'){ // Command mode
inChar = true;
while(inChar){
if (Serial.available()) {
ch = Serial.read();
// '/+' is for brightness increment
if(ch == '+'){
if(BTvalue < 15) {
BTvalue ++;
matrix.setIntensity(BTvalue);
}
break;
}
// '/-' is for brightness decrement
if(ch == '-'){
if(BTvalue > 0){
BTvalue --;
matrix.setIntensity(BTvalue);
}
break;
}
// '/>' is to slow down scroll
if(ch == '>'){
if(scrollspeed < 200) {
scrollspeed = scrollspeed + 20;
}
break;
}
// '/<' is to make scroll faster
if(ch == '<'){
if(scrollspeed > 10){
scrollspeed=scrollspeed-10;
}
break;
}
// '/e' is to erase display
if(ch == 'e'){
dataAvailable = false;
break;
}
// '/p' is to pause display
if(ch == 'p'){
if(pause == false){
pause = true;
}
else {
pause = false;
}
break;
}
else {
break; // Unrecognized command
}
}
}
} // if(ch == '!')
} // while(serial.available)
inService = false;
}