Arduino Train Demo for ESP32, NANO, UNO and MEGA © Apache-2.0
DESCRIPTION
Hello there! I have designed a Universal Railroad Bus (URB) system as a tool for creating a model railway management system. This USB system lets the modeler create a management system completely custom to his own layout. It is completely expandable as his layout grows. The modeler can start off slowly with a simple system and add to it as he goes along. This system provides the modeler with none of the restrictions that are characteristic of off-the-shelf control systems, such as the DCC, and without the large cash layout.
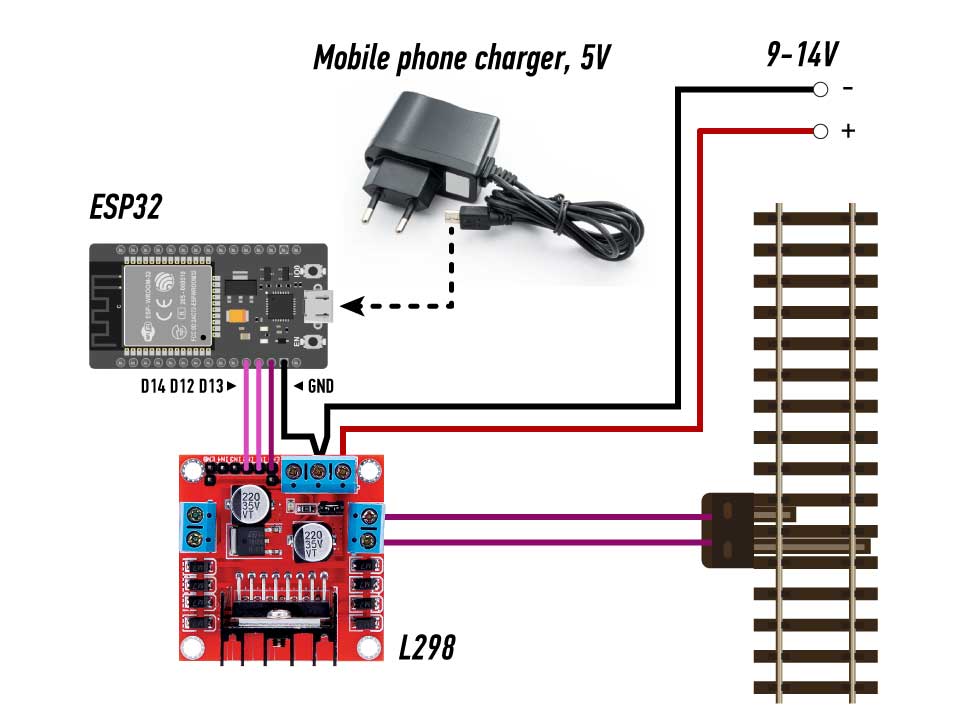
To try this system, I created a free application Arduino Train DEMO. You also need any micro controller, Bluetooth module, motor-driver and several wires. I created for you sketches that fit the most popular Arduino products - NANO, UNO, MEGA and ESP32 (for ESP32 Bluetooth module is not needed).

The sample offered here is very simple. You can use ANY model train kit with metal rails (for example, an old version of LEGO TRAINS with metal rails). Probably, if you are interested in my project, you already have such a kit or a set of rails and trains in a storage box.
The video tutorial explains the process of creating a control system for ESP32 DOIT DEVKIT. For other Arduino boards, the principle is the same, but please use the appropriate sketches and circuits.
You can expand this system infinitely by adding sound effects, managing all the elements of your railway layout and so one. All aboard!
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
 |
| |||
|
Hello there! I have designed a Universal Railroad Bus (URB) system as a tool for creating a model railway management system. This USB system lets the modeler create a management system completely custom to his own layout. It is completely expandable as his layout grows. The modeler can start off slowly with a simple system and add to it as he goes along. This system provides the modeler with none of the restrictions that are characteristic of off-the-shelf control systems, such as the DCC, and without the large cash layout.
To try this system, I created a free application Arduino Train DEMO. You also need any micro controller, Bluetooth module, motor-driver and several wires. I created for you sketches that fit the most popular Arduino products - NANO, UNO, MEGA and ESP32 (for ESP32 Bluetooth module is not needed).
The sample offered here is very simple. You can use ANY model train kit with metal rails (for example, an old version of LEGO TRAINS with metal rails). Probably, if you are interested in my project, you already have such a kit or a set of rails and trains in a storage box.
The video tutorial explains the process of creating a control system for ESP32 DOIT DEVKIT. For other Arduino boards, the principle is the same, but please use the appropriate sketches and circuits.
You can expand this system infinitely by adding sound effects, managing all the elements of your railway layout and so one. All aboard!