Hand gesture control wheelchair for disabled people © GPL3+
DESCRIPTION
https://drive.google.com/open?id=1RNI2ehaknWPN0lPpKm8wv95DUVcTr8H6

•The percentage of disabled people has increased in both rural and urban part of India. The disability could be by birth or due to some medical or accidental reason.
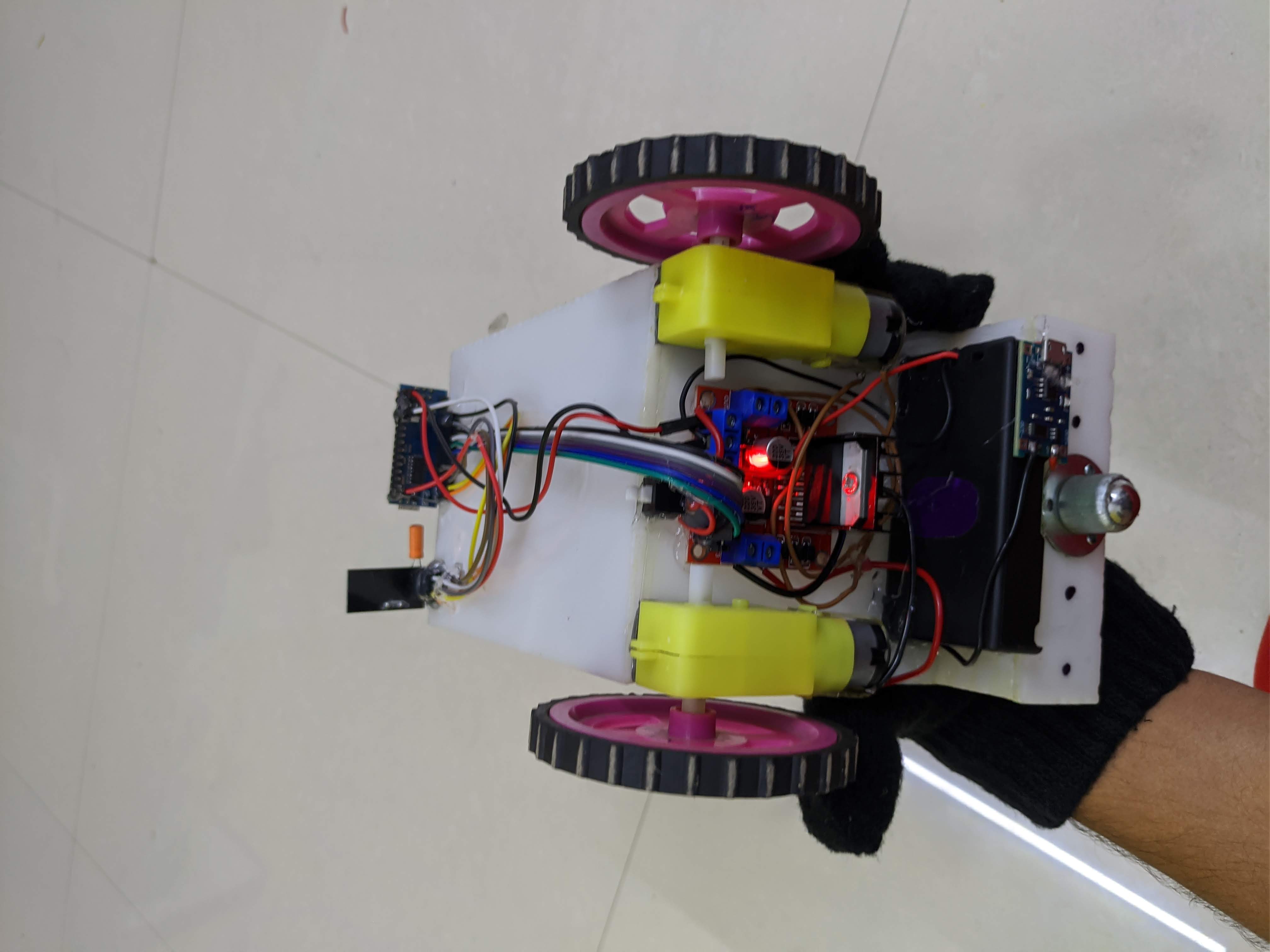
•The aim of this project is to make a hand gesture controlled wheel chair and using Accelerometer as sensor to help the physically disabled people in moving from one place to another just by giving direction from the hand
•Today in India many people are suffering from disability, there are people whose lower half of the body is paralyzed. This Wheelchair will add on to the comfort and make the life of people bit easier




 |
| |||
 |
|

https://drive.google.com/open?id=1RNI2ehaknWPN0lPpKm8wv95DUVcTr8H6
•The percentage of disabled people has increased in both rural and urban part of India. The disability could be by birth or due to some medical or accidental reason.
•The aim of this project is to make a hand gesture controlled wheel chair and using Accelerometer as sensor to help the physically disabled people in moving from one place to another just by giving direction from the hand
•Today in India many people are suffering from disability, there are people whose lower half of the body is paralyzed. This Wheelchair will add on to the comfort and make the life of people bit easier