RC tank on Arduino © GPL3+
DESCRIPTION
The tank gun shoots with plastic balls. Laser sight. Headlights. Assembled based on the Arduino Nano platform. The chassis is made on the L298N driver. As a rotary tower, a rotary bracket on two servos is used. 4 18650 batteries provide long battery life. Radio module APC220 or NS-12. Powerful loads are controlled using the Darlington ULN2803 assembly.
The chassis and lid of the tank were purchased at the Sinonig store.

See chassis overview in this video:
The tank gun was also purchased at the Sinoning Store.
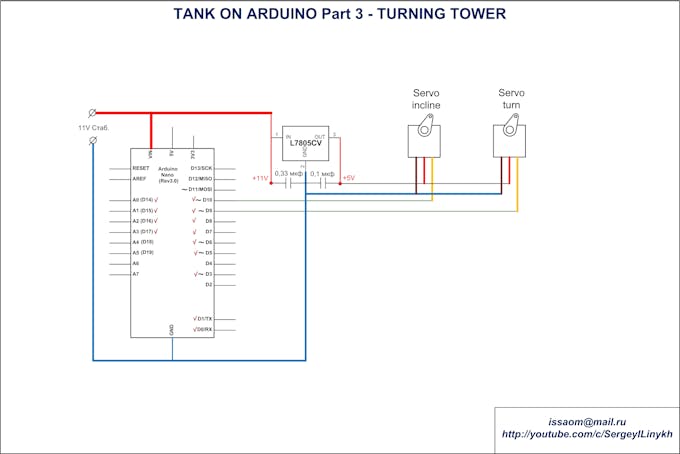
As a tower, a swivel bracket and two servos were used:
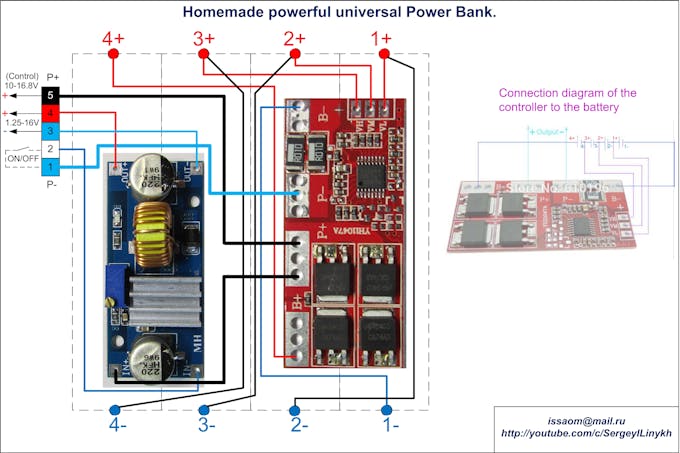
A powerful home-made power bank was used for power.
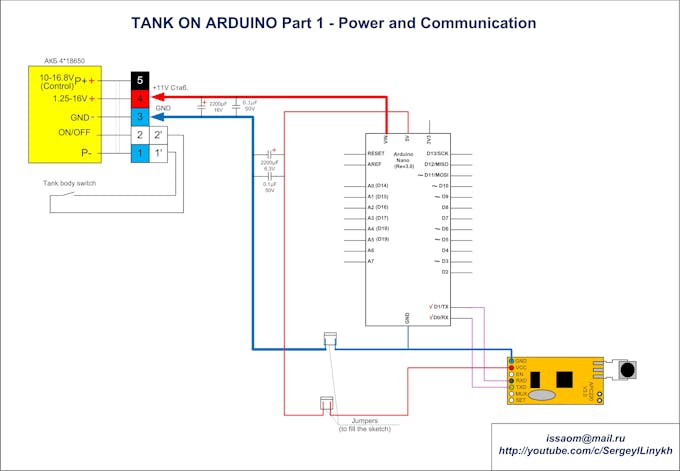
Two UART APC220 modules are used for communication
To control the motors used driver L298N.

Servos are powered by the L7805CV driver
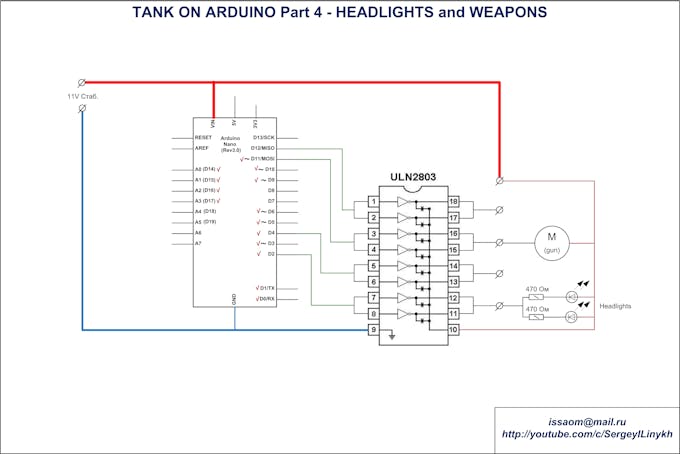
Tank gun and headlights powered by Darlington assembly
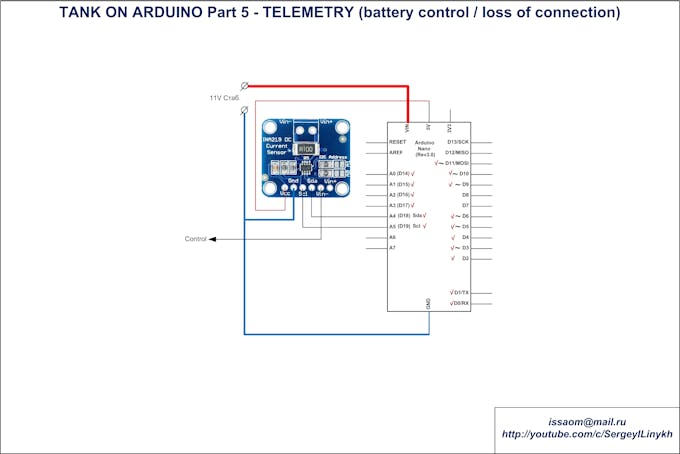
INA219 module is used for battery monitoring:
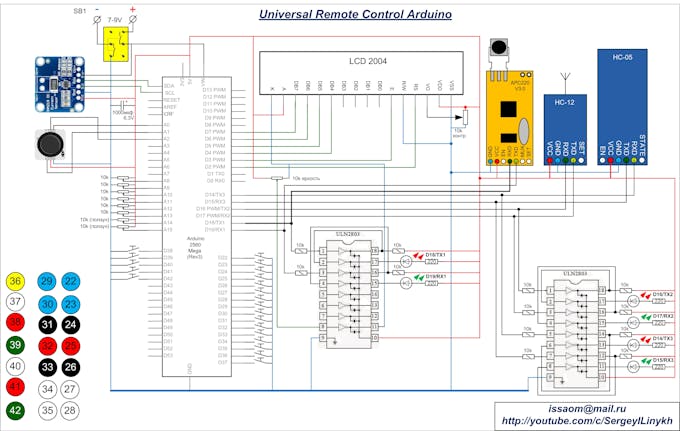
For radio control uses a universal remote control based on arduino mega:



The tank gun shoots with plastic balls. Laser sight. Headlights. Assembled based on the Arduino Nano platform. The chassis is made on the L298N driver. As a rotary tower, a rotary bracket on two servos is used. 4 18650 batteries provide long battery life. Radio module APC220 or NS-12. Powerful loads are controlled using the Darlington ULN2803 assembly.
The chassis and lid of the tank were purchased at the Sinonig store.
See chassis overview in this video:
The tank gun was also purchased at the Sinoning Store.
As a tower, a swivel bracket and two servos were used:
A powerful home-made power bank was used for power.
Two UART APC220 modules are used for communication
To control the motors used driver L298N.
Servos are powered by the L7805CV driver
Tank gun and headlights powered by Darlington assembly
INA219 module is used for battery monitoring:
For radio control uses a universal remote control based on arduino mega:
#include <LiquidCrystal.h>
LiquidCrystal lcd(2, 3, 4, 5, 6, 7);
byte buttonS = 0; //
byte buttonS_OLD = 0; // int connect = 0;
int connect_OK = 0; // ?
byte go_Old = 14; //
byte go_New = 14; //
byte adj_Old = 20; //
byte adj_New = 20; //
byte motor_Send = 14; //
byte bounce_b = 50; //
const int pinZ = 57; //
const int pinX = A1; // X
const int pinY = A2; // Y
int jvalueX; // X
int jvalueY; // Y
byte turret = 0; // (1 X+, 2 X-)
boolean turret_stop = false; // (1 X+, 2 X-)
void setup() {
Serial1.begin(9600); //open port APC220
pinMode(57, INPUT);
pinMode(36, INPUT_PULLUP); // light -
pinMode(37, INPUT_PULLUP); // laser Sight -
pinMode(38, INPUT_PULLUP); // gun -
pinMode(22 , INPUT_PULLUP);
pinMode(23 , INPUT_PULLUP);
pinMode(24 , INPUT_PULLUP);
pinMode(25 , INPUT_PULLUP);
pinMode(26 , INPUT_PULLUP);
pinMode(27 , INPUT_PULLUP);
pinMode(28 , INPUT_PULLUP);
pinMode(29 , INPUT_PULLUP);
pinMode(30 , INPUT_PULLUP);
pinMode(31 , INPUT_PULLUP);
pinMode(32 , INPUT_PULLUP);
pinMode(33 , INPUT_PULLUP);
pinMode(34 , INPUT_PULLUP);
pinMode(35 , INPUT_PULLUP);
//
lcd.begin(20, 4);
lcd.setCursor(8, 0);
lcd.print("LSG");
lcd.setCursor(8, 1);
lcd.print("000");
lcd.setCursor(8, 2);
lcd.print("---");
lcd.setCursor(0, 4);
lcd.print("link--");
//
lcd.setCursor(0, 0);
lcd.print(go_New);
lcd.setCursor(0, 1);
lcd.print(adj_New);
//
lcd.setCursor(15, 1);
lcd.print("j");
}
//---------------------------------------------------|
// 2- |
//---------------------------------------------------|
int Byte2sendFunction(byte BYTE1, byte BYTE2){
int result;
// !!!
Serial1.setTimeout(2000);
// 2 2-
byte Byte2send[2] = {0,0}; //
byte Byte2receipt[2] = {0,0}; //
//
Byte2send[0] = BYTE1;
Byte2send[1] = BYTE2;
//
Serial1.write (Byte2send,2);
//
Serial1.readBytes(Byte2receipt,2);
//
if ((Byte2send[0] == Byte2receipt[0])&&(Byte2send[1] == Byte2receipt[1])) {
// result = 1 0
result = 1;
lcd.setCursor(5, 4);
lcd.print("Y"); // !!!
} else {
result = 0;
lcd.setCursor(5, 4);
lcd.print("N"); // !!!
}
//
return result;
}
//---------------------------------------------------|
void loop() {
//---------------------------------------------------|
// !!! |
//---------------------------------------------------|
if (!digitalRead(36)) { //
bitWrite(buttonS, 0, !(bitRead(buttonS, 0))); //
lcd.setCursor(8, 1);
lcd.print(bitRead(buttonS, 0));
}
if (!digitalRead(37)) { //
bitWrite(buttonS, 1, !(bitRead(buttonS, 1))); //
lcd.setCursor(9, 1);
lcd.print(bitRead(buttonS, 1));
}
//
bitWrite(buttonS, 2, !digitalRead(38)); //
lcd.setCursor(10, 1);
lcd.print(bitRead(buttonS, 2));
//---------------------------------------------------|
// |
//---------------------------------------------------|
if (buttonS!=buttonS_OLD) {
connect_OK = Byte2sendFunction(1,buttonS);
buttonS_OLD = buttonS;
// !!!
if (connect_OK == 1) {
lcd.setCursor(8, 2);
lcd.print(bitRead(buttonS, 0));
lcd.setCursor(9, 2);
lcd.print(bitRead(buttonS, 1));
lcd.setCursor(10,2);
lcd.print(bitRead(buttonS, 2));
}
// !!!
if (connect_OK == 0) {
lcd.setCursor(8, 2);
lcd.print("---");
}
}
//---------------------------------------------------|
// !!! |
//---------------------------------------------------|
adj_New = 20;
if (!digitalRead(32)) {
delay(bounce_b);
if (!digitalRead(25)) go_New = 14; else adj_New = 32;
}
if (!digitalRead(25)) {
delay(bounce_b);
if (!digitalRead(32)) go_New = 14; else adj_New = 25;
}
if (!digitalRead(31)) {
delay(bounce_b);
if (!digitalRead(24)) go_New = 15; else adj_New = 31;
}
if (!digitalRead(24)) {
delay(bounce_b);
if (!digitalRead(31)) go_New = 15; else adj_New = 24;
}
if (!digitalRead(30)) {
delay(bounce_b);
if (!digitalRead(23)) go_New = 16; else adj_New = 30;
}
if (!digitalRead(23)) {
delay(bounce_b);
if (!digitalRead(30)) go_New = 16; else adj_New = 23;
}
if (!digitalRead(29)) {
delay(bounce_b);
if (!digitalRead(22)) go_New = 17; else adj_New = 29;
}
if (!digitalRead(22)) {
delay(bounce_b);
if (!digitalRead(29)) go_New = 17; else adj_New = 22;
}
if (!digitalRead(33)) {
delay(bounce_b);
if (!digitalRead(26)) go_New = 13; else adj_New = 33;
}
if (!digitalRead(26)) {
delay(bounce_b);
if (!digitalRead(33)) go_New = 13; else adj_New = 26;
}
if (!digitalRead(34)) {
delay(bounce_b);
if (!digitalRead(27)) go_New = 12; else adj_New = 34;
}
if (!digitalRead(27)) {
delay(bounce_b);
if (!digitalRead(34)) go_New = 12; else adj_New = 27;
}
if (!digitalRead(35)) {
delay(bounce_b);
if (!digitalRead(28)) go_New = 11; else adj_New = 35;
}
if (!digitalRead(28)) {
delay(bounce_b);
if (!digitalRead(35)) go_New = 11; else adj_New = 28;
}
if ((go_Old != go_New) || (adj_Old != adj_New)){
//
lcd.setCursor(0, 0);
lcd.print(go_New);
lcd.setCursor(0, 1);
lcd.print(adj_New);
if (adj_New > 20) { //
motor_Send = adj_New;
adj_Old = adj_New;
} else { //
motor_Send = go_New;
go_Old = go_New;
adj_Old = 20; //
}
// !!!
connect_OK = Byte2sendFunction(2,motor_Send);
// !!!
if (connect_OK == 1) {
lcd.setCursor(0, 2);
lcd.print(motor_Send);
}
// !!!
if (connect_OK == 0) {
lcd.setCursor(0, 2);
lcd.print("--");
}
} //
//---------------------------------------------------|
// !!! |
//---------------------------------------------------|
// !!!
if (digitalRead(pinZ)) {
lcd.setCursor(16, 0);
lcd.print("Z");
} else {
lcd.setCursor(16, 0);
lcd.print("z");
}
//
jvalueX = analogRead(pinX);
jvalueY = analogRead(pinY);
turret = 0;
//0- -
//1- -
if (jvalueX > 712) bitWrite(turret, 0, 1);
if (jvalueX < 312) bitWrite(turret, 1, 1);
//4 " "
if ((jvalueX > 1013)||(jvalueX < 10)) bitWrite(turret, 4, 1);
//
lcd.setCursor(16, 1);
lcd.print(bitRead(turret,0));
lcd.setCursor(14, 1);
lcd.print(bitRead(turret,1));
//2- -
//3- -
if (jvalueY > 712) bitWrite(turret, 2, 1);
if (jvalueY < 312) bitWrite(turret, 3, 1);
// Y
lcd.setCursor(15, 0);
lcd.print(bitRead(turret,2));
lcd.setCursor(15, 1);
lcd.print(bitRead(turret,3));
lcd.setCursor(15, 2);
lcd.print(" ");
lcd.setCursor(15, 2);
lcd.print(jvalueX);
if (turret !=0) {
connect_OK = Byte2sendFunction(3,turret);
turret_stop = true;
}
if ((turret == 0) && (turret_stop)) {
connect_OK = Byte2sendFunction(3,0);
turret_stop = false;
}
}
#include <Servo.h>
Servo servoX;
Servo servoY;
byte X = 87;
byte Xmin = 10;
byte Xmax = 165;
byte Xplus = 0;
byte Yplus = 0;
byte Y = 78;
byte Ymin = 60;
byte Ymax = 103;
byte turret = 0; // (1 X+, 2 X-)
byte IncomingCount = 0; //
byte Byte2incoming[2] = {0,0}; //
byte b_registry = 0; //
byte laserPWM = 128;
byte buttonS = 0; //
byte motorS = 14; //
byte Speed1_pwm = 56; //
byte Speed2_pwm = 96; //
byte Speed3_pwm = 255; //
byte Speed1RL_pwm = 88; //
byte Speed2RL_pwm = 112; //
byte Speed3RL_pwm = 255; //
byte Speed0RL_pwm = 128; //
void setup() {
Serial.begin(9600);
// !!!
Serial.setTimeout(500);
pinMode(02, OUTPUT); // light -
pinMode(06, OUTPUT); // laser -
pinMode(11, OUTPUT); // gun -
pinMode(13, OUTPUT); //
// L298N
pinMode(3, OUTPUT); //D3 - ENA
pinMode(17, OUTPUT); //AO - INPUT1
pinMode(16, OUTPUT); //A1 - INPUT2
pinMode(15, OUTPUT); //A2 - INPUT3
pinMode(14, OUTPUT); //A3 - INPUT4
pinMode(5, OUTPUT); //D5 - ENB
servoX.attach(9);
servoY.attach(10);
//
servoX.write(X);
servoY.write(Y);
}
void loop() {
// 1.5 2-
// 1.5
//
IncomingCount = Serial.readBytes(Byte2incoming,2);
if (IncomingCount > 1) { // 2 -
//digitalWrite(13, LOW);
// 2- !!!
b_registry = Byte2incoming[0];
// !!!
if (b_registry == 1) buttonS = Byte2incoming[1];
// !!!
if (b_registry == 2) motorS = Byte2incoming[1];
// !!!
if (b_registry == 3) turret = Byte2incoming[1];
// 2 -
Serial.write (Byte2incoming,2);
} else { // ( ) 1.5
//digitalWrite(13, HIGH);
// - !!!
}
//---------------------------------------------------|
// |
//---------------------------------------------------|
digitalWrite(02,bitRead(buttonS, 0)); // light -
if (bitRead(buttonS, 1)) { // laser Sight -
analogWrite(6, laserPWM); //
} else analogWrite(6, 0);
if (bitRead(buttonS, 2)) { //
analogWrite(11,160); //
delay(125); // pwm160
analogWrite(11,0); // 125ms
bitWrite(buttonS, 2, 0); //
}
//---------------------------------------------------|
// L298N |
//---------------------------------------------------|
if (motorS == 14){
//
analogWrite(3, 0); //D3 - ENA
digitalWrite(14, 0); //AO - INPUT1
digitalWrite(15, 0); //A1 - INPUT2
//
analogWrite(5, 0); //D5 - ENA
digitalWrite(16, 0); //A2 - INPUT3
digitalWrite(17, 0); //A3 - INPUT4
}
//
if (motorS == 15){
//
analogWrite(3, Speed1_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed1_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 13){
//
analogWrite(3, Speed1_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed1_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 24){
//
analogWrite(3, Speed1RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed1RL_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 31){
//
analogWrite(3, Speed1RL_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed1RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 26){
//
analogWrite(3, Speed1RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed1RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 33){
//
analogWrite(3, Speed1RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed1RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
//
if (motorS == 17){
//
analogWrite(3, Speed3_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed3_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 11){
//
analogWrite(3, Speed3_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed3_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 22){
//
analogWrite(3, Speed3RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed3RL_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 29){
//
analogWrite(3, Speed3RL_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed3RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 28){
//
analogWrite(3, Speed3RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed3RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 35){
//
analogWrite(3, Speed3RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed3RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
// 4
//4
if (motorS == 16){
//
analogWrite(3, Speed2_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed2_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 12){
//
analogWrite(3, Speed2_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed2_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 23){
//
analogWrite(3, Speed2RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed2RL_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 30){
//
analogWrite(3, Speed2RL_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed2RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
if (motorS == 27){
//
analogWrite(3, Speed2RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed2RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 34){
//
analogWrite(3, Speed2RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed2RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
// 4
//
if (motorS == 32){
//
analogWrite(3, Speed0RL_pwm); //D3 - ENA
digitalWrite(16, 1); //AO - INPUT1
digitalWrite(17, 0); //A1 - INPUT2
//
analogWrite(5, Speed0RL_pwm); //D5 - ENA
digitalWrite(14, 0); //A2 - INPUT3
digitalWrite(15, 1); //A3 - INPUT4
}
if (motorS == 25){
//
analogWrite(3, Speed0RL_pwm); //D3 - ENA
digitalWrite(16, 0); //AO - INPUT1
digitalWrite(17, 1); //A1 - INPUT2
//
analogWrite(5, Speed0RL_pwm); //D5 - ENA
digitalWrite(14, 1); //A2 - INPUT3
digitalWrite(15, 0); //A3 - INPUT4
}
//
if (bitRead(turret,4)) Xplus = Xplus + 1; else Xplus = 0;
if (bitRead(turret,1) && ((X<Xmax))) X=X+1+Xplus;
if (bitRead(turret,0) && ((X>Xmin))) X=X-1-Xplus;
servoX.write(X);
if (bitRead(turret,3) && ((Y<Ymax))) Y=Y+1;
if (bitRead(turret,2) && ((Y>Ymin))) Y=Y-1;
servoY.write(Y);
}
